A 15-week
collaborative project sponsored by NASA's Ames Research Center
Role: Research, Ideation, 2D/ 3D Visualization, Prototyping, Industrial Design, UxD, CMF
Team member: Rongyu Na( Industrial Design Lead), Izzy Britos (Industrial Design), Meiki Kim (Graphic Design)
![]()
![]()
Role: Research, Ideation, 2D/ 3D Visualization, Prototyping, Industrial Design, UxD, CMF
Team member: Rongyu Na( Industrial Design Lead), Izzy Britos (Industrial Design), Meiki Kim (Graphic Design)





Background:
Juggling priorities and schedules plays a big part in an astronaut’s life aboard the International Space Station. Free space station flyers (robots) help astronauts save time on routine tasks, allowing them to focus on tasks that only humans can do. They serve as a science platform for guest scientist experiments, a STEM education tool, a companion or assistant for daily tasks such as inventory and experiment documentation.
Astrobee’s roles:
︎ Enable guest science (replace SPHERES)
︎Demonstrate feasibility of intravehicular robot caretaking for future human exploration vehicles
︎ Provide an opportunity for future automation of certain ISS operations (monitor crew activities, conduct sensor surveys)
︎“Robots such as Astrobee, have the capacity to become caretakers for future spacecraft, working to monitor and keep systems operating smoothly while crew are away.”
-- NASA Ames Research Center
︎︎︎More about Astrobee



Research:
At the beginning, the team had all watched space movies, but no one knew how to create a robot that could move around freely in a space station. Thanks to NASA for providing us with a wealth of information. During the research process, our team intended to obtain insights in four areas:
1. Find out how astronauts spend their days, what bothers them, and where robots might be able to help.
2. Learn the difference between a microgravity environment and a gravity environment.
3. Analyze the structures and functions of current flying robots.
4. Learn about the space program in the next 30 years and see where free-flying robots could contribute.
Problem Area:
︎Spacecraft have limited propulsion and can only carry food for a few months. Being able to grow food in space becomes critical to a deep space mission.
︎ Space's time lags prevent the ground control center from remotely controlling the robot in real time. Robots require a high level of autonomy.
︎ Astronauts have busy schedules every day; however, finding a lost screwdriver can take up to an hour of an astronaut's time. Reduced astronaut chores will allow them to focus on critical tasks.
Key Insights:
︎ Some space experiments can be done without astronauts.
︎ Newton's laws of motion are very important for designing space robots, and the design must always take into account how to balance undesirable forces.
︎ In a spaceship, it's better to move slowly because reaction forces and inertia could cause damage.
︎ In a microgravity environment, the motor usually doesn't need to put out extra force to counteract gravity.
Astrobee's Opportunities:
After learning about the space station and space robots, our team decided to use the mind map to generate further ideas. In addition, we conducted a SWOT analysis and sketched out competitor positions to identify Astrobee's distinct and irreplaceable advantages.
![]()
![]()
![]()
After learning about the space station and space robots, our team decided to use the mind map to generate further ideas. In addition, we conducted a SWOT analysis and sketched out competitor positions to identify Astrobee's distinct and irreplaceable advantages.
Observations:
︎All free-flying robots have limited functionality.
︎Free-flying robots can't operate for extended periods of time, including getting from one capsule to another.
︎Humanoid robots like R2 are capable of doing sophisticated tasks, but they are overkill for jobs that are easy to moderately hard.
︎All free-flying robots have limited functionality.
︎Free-flying robots can't operate for extended periods of time, including getting from one capsule to another.
︎Humanoid robots like R2 are capable of doing sophisticated tasks, but they are overkill for jobs that are easy to moderately hard.
Aha Moment:
︎For the new Astrobee to do many different jobs, it needs a system that can be changed and grown.
︎Mobility and extended operation time allow future Astrobees to be able to do more tasks.
︎Astrobee's competitive advantage will focus on low-to-medium difficulty missions and the ability to integrate with spacecraft systems.
︎For the new Astrobee to do many different jobs, it needs a system that can be changed and grown.
︎Mobility and extended operation time allow future Astrobees to be able to do more tasks.
︎Astrobee's competitive advantage will focus on low-to-medium difficulty missions and the ability to integrate with spacecraft systems.
Framing Direction:
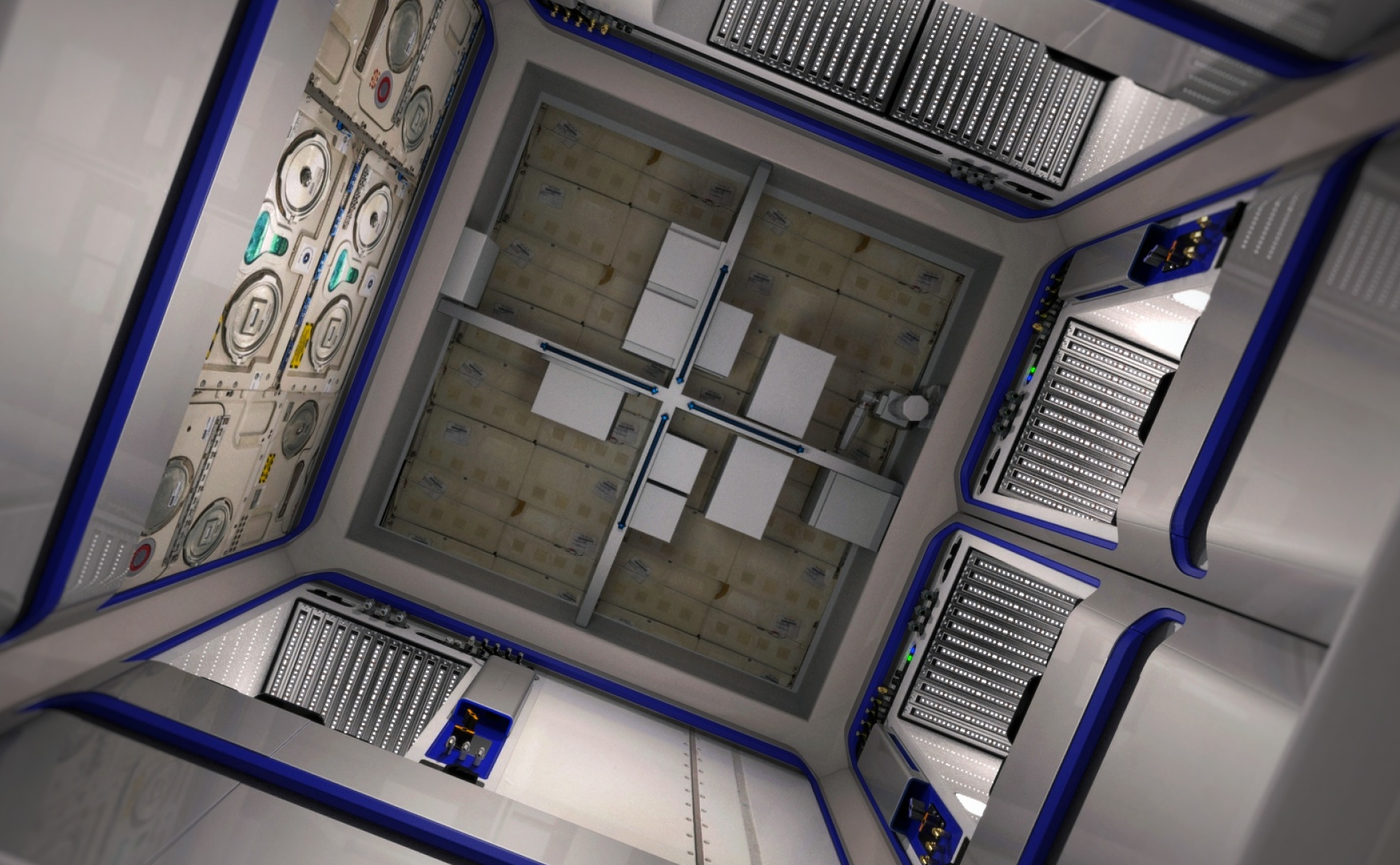
After consulting with the NASA team and hearing their thoughts, we decided that the new Astrobee would prioritize space farming and a modular platform. The Artemis program's Lunar Gateway will be the ideal location for testing Astrobee's space agriculture capabilities. Besides, the modular design will let other functions be built on top of it, and different parts can be made to meet the different needs of future space missions.
Humans have been exploring space around 70 years, but space agriculture has only started in the last 20 years, and there are still many unknown challenges. We used storyboards to determine how Astrobee participates in Lunar Gateway activities and to group distinct ideas from complex information. Our team also mapped the user flow for the following scenarios:
︎Astronauts and Astrobee arrive at Lunar gateway.
︎The crew returns to Earth, leaving Astrobee alone.
︎Astrobee gets ready for new astronauts to arrive.
︎Astronauts and Astrobee arrive at Lunar gateway.
︎The crew returns to Earth, leaving Astrobee alone.
︎Astrobee gets ready for new astronauts to arrive.
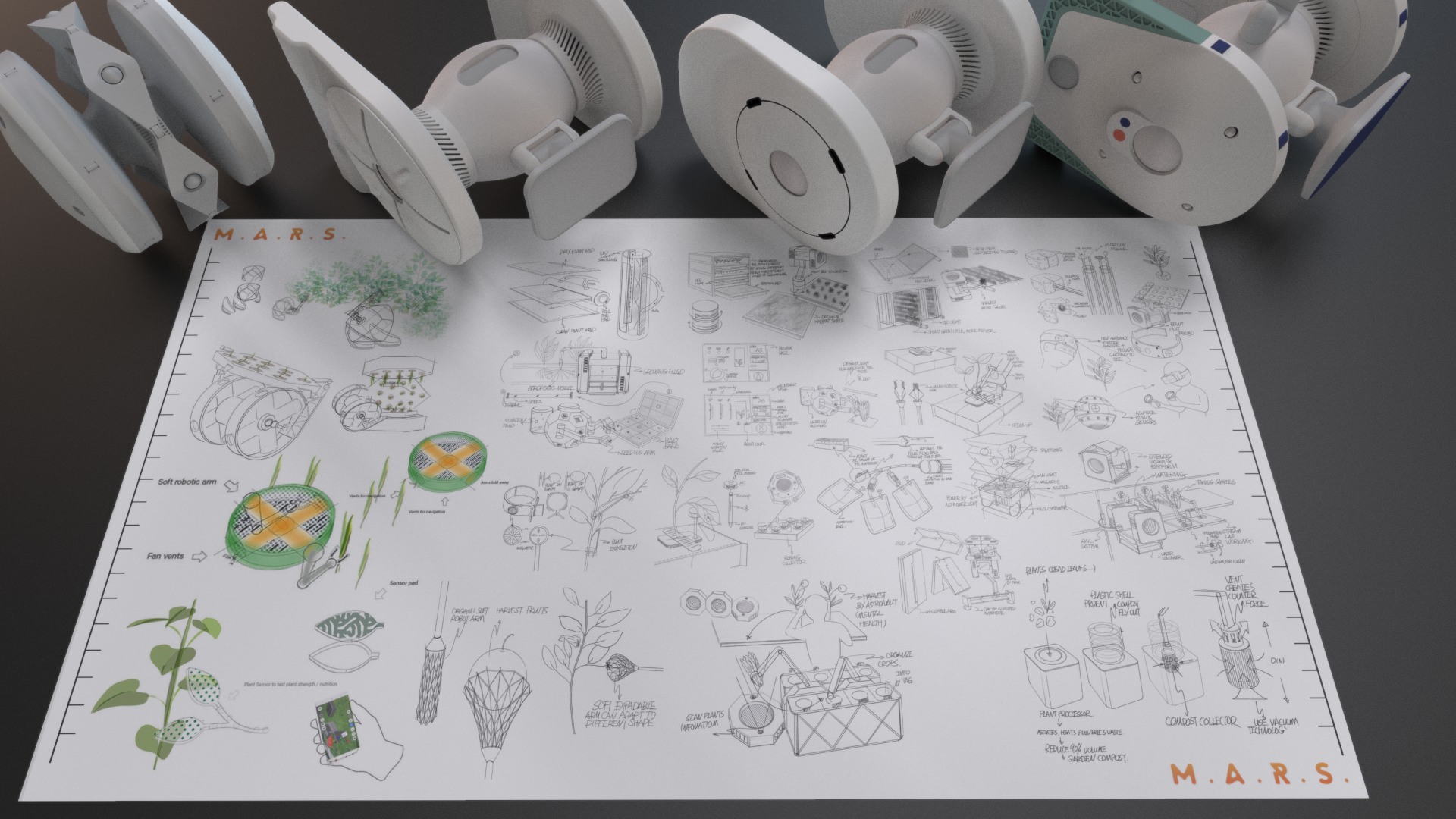
Ideation:
How can we maximize Astrobee's functionality while saving space (due to the restricted area available on the Lunar Gateway)?
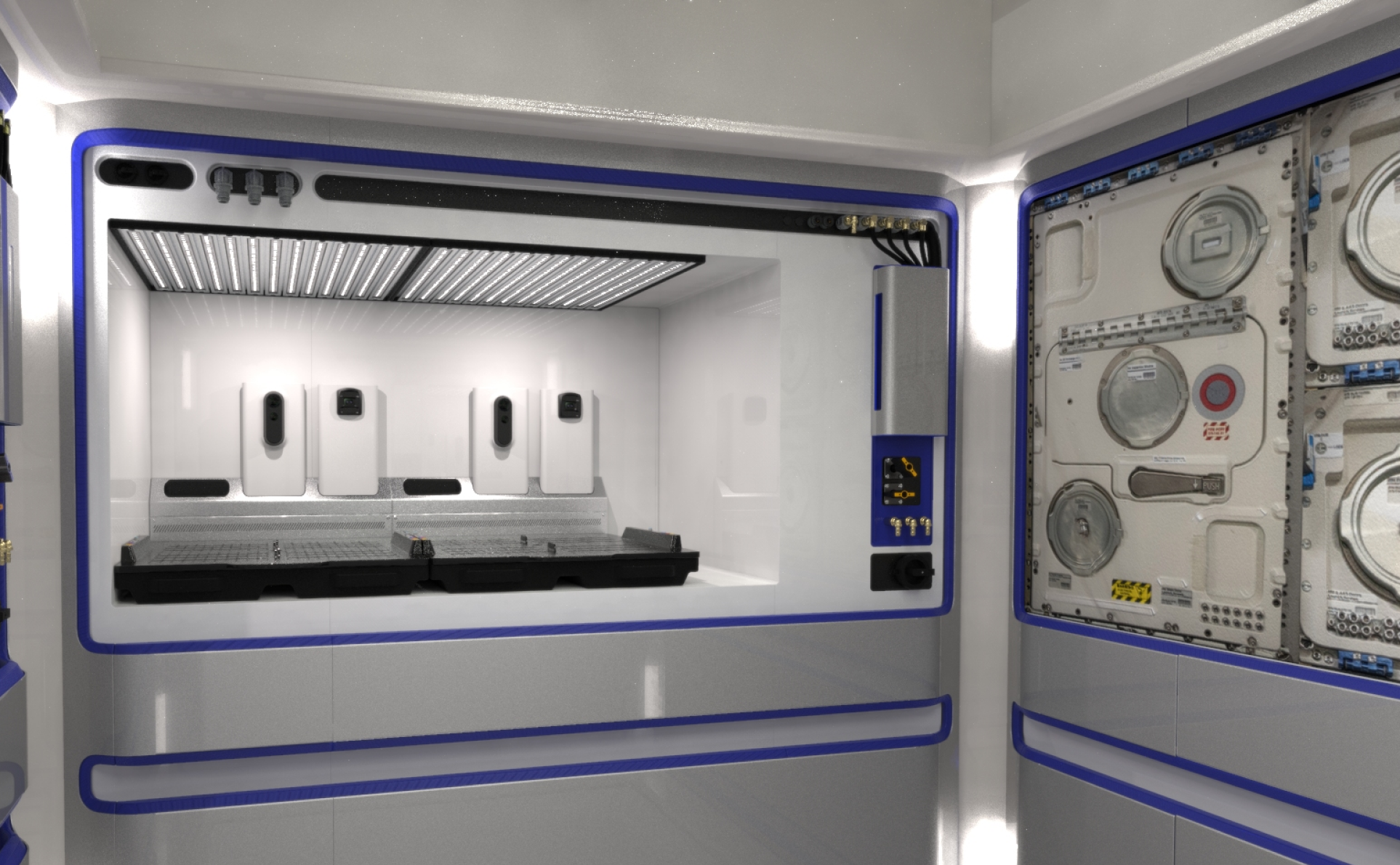
How might Astrobee help astronauts grow plants in the Advanced Plant Habitat (APH) system?
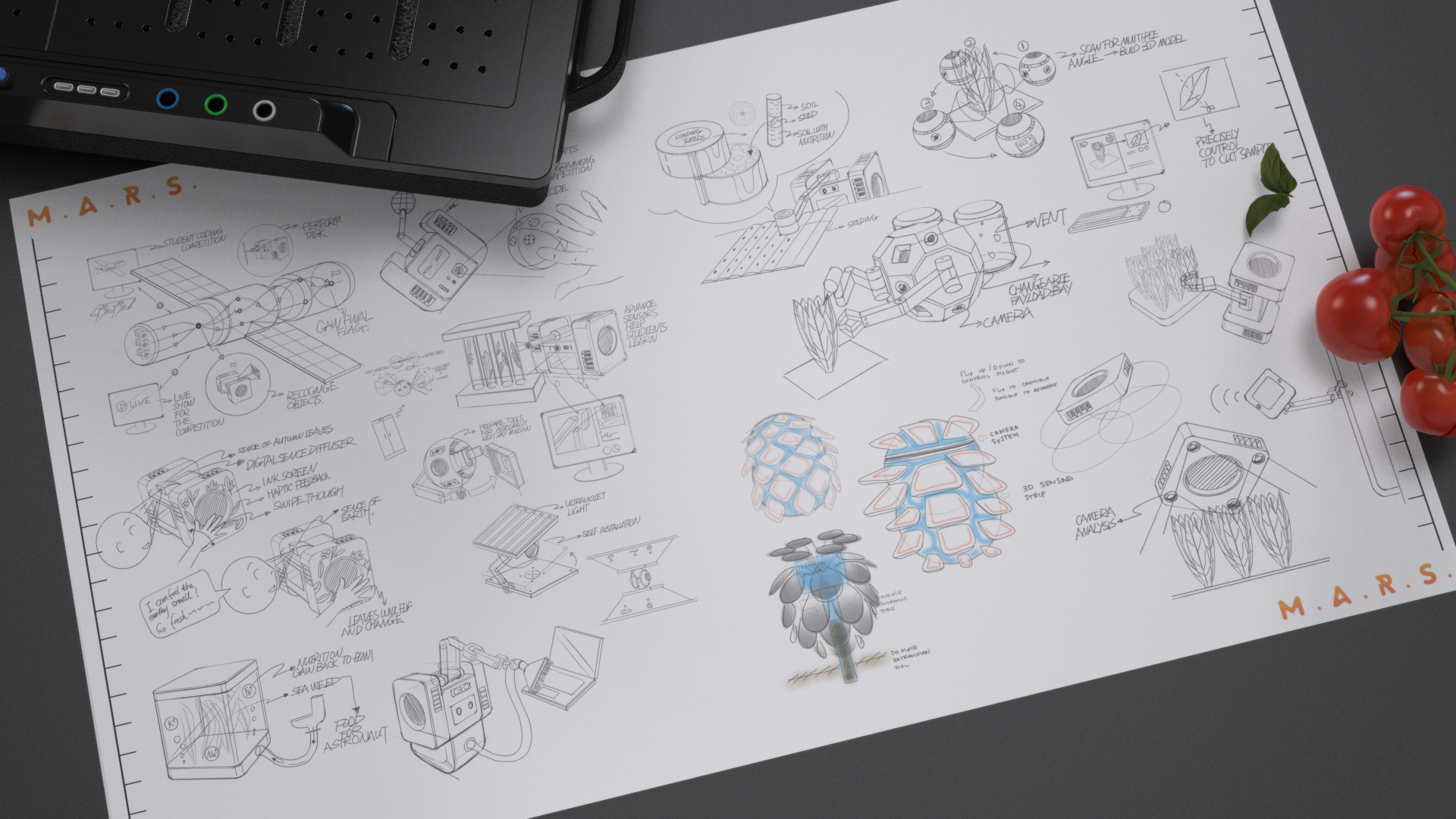
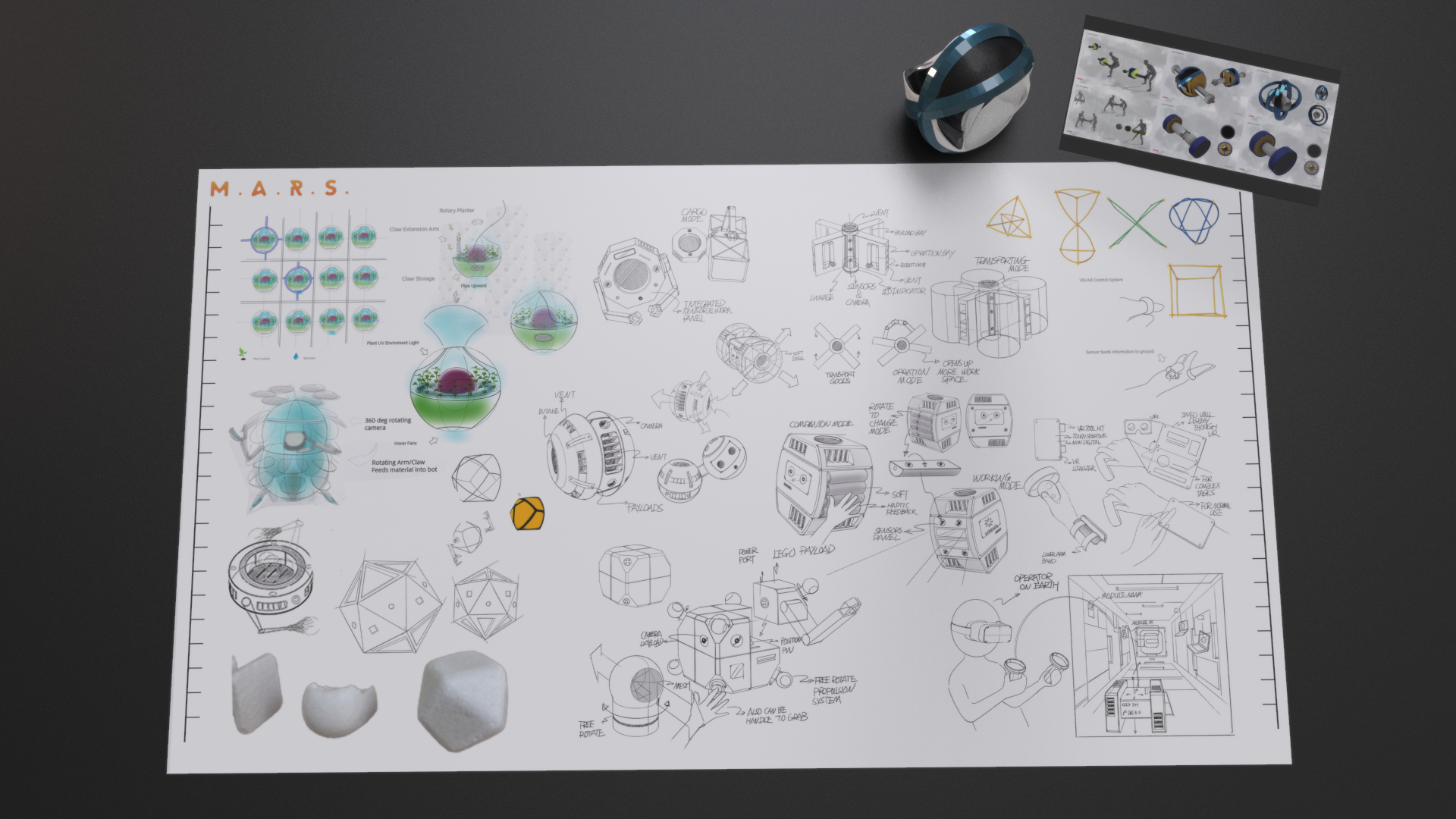
During the process, we sketched out the ideas for the potentail Astrobee design. Then we collaborated with the NASA team to brainstorm the possible Astrobee's features and effectively classify them into groups. In the end, the team voted on the core design direction.
Design Iterations:
Modular System:
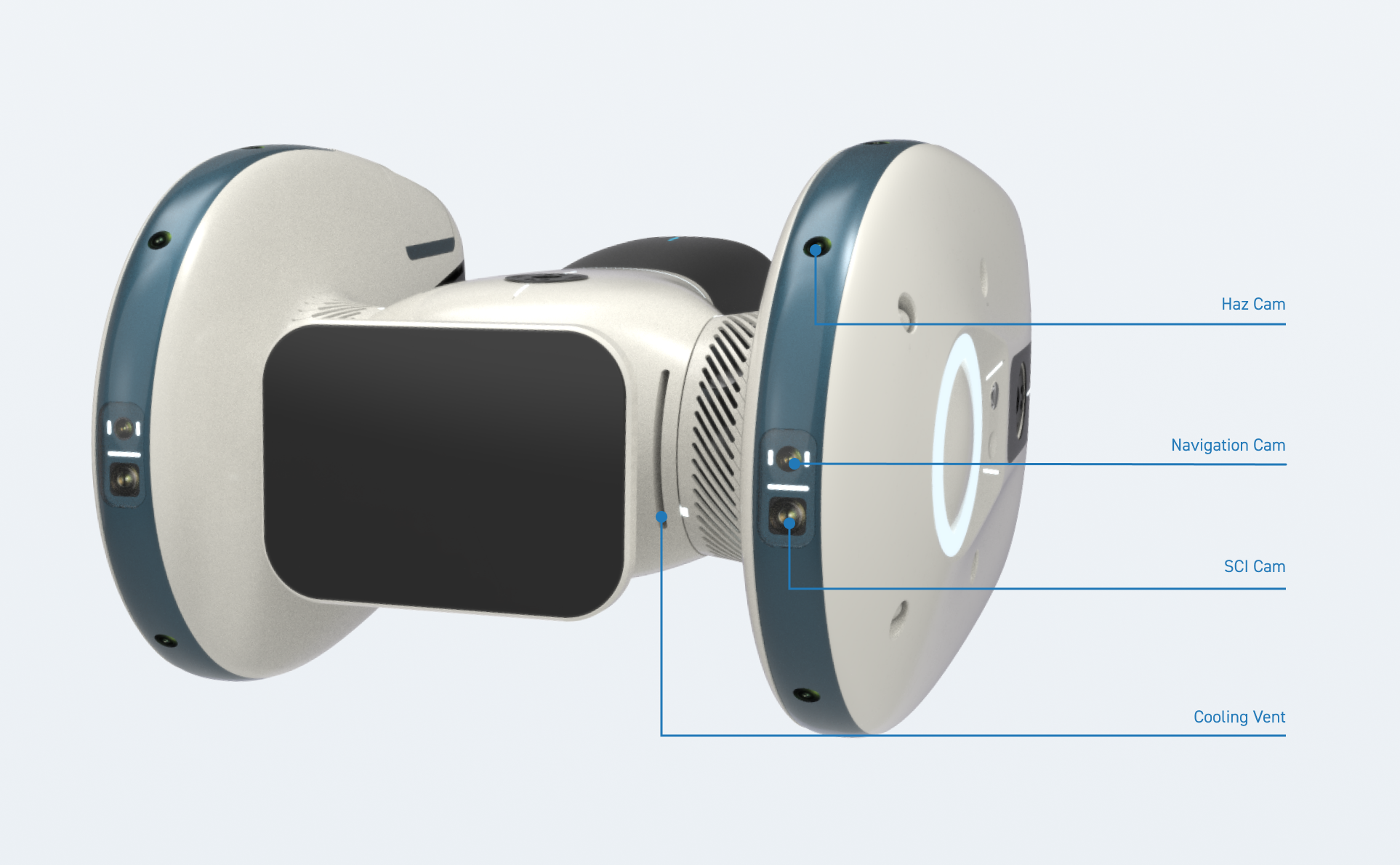
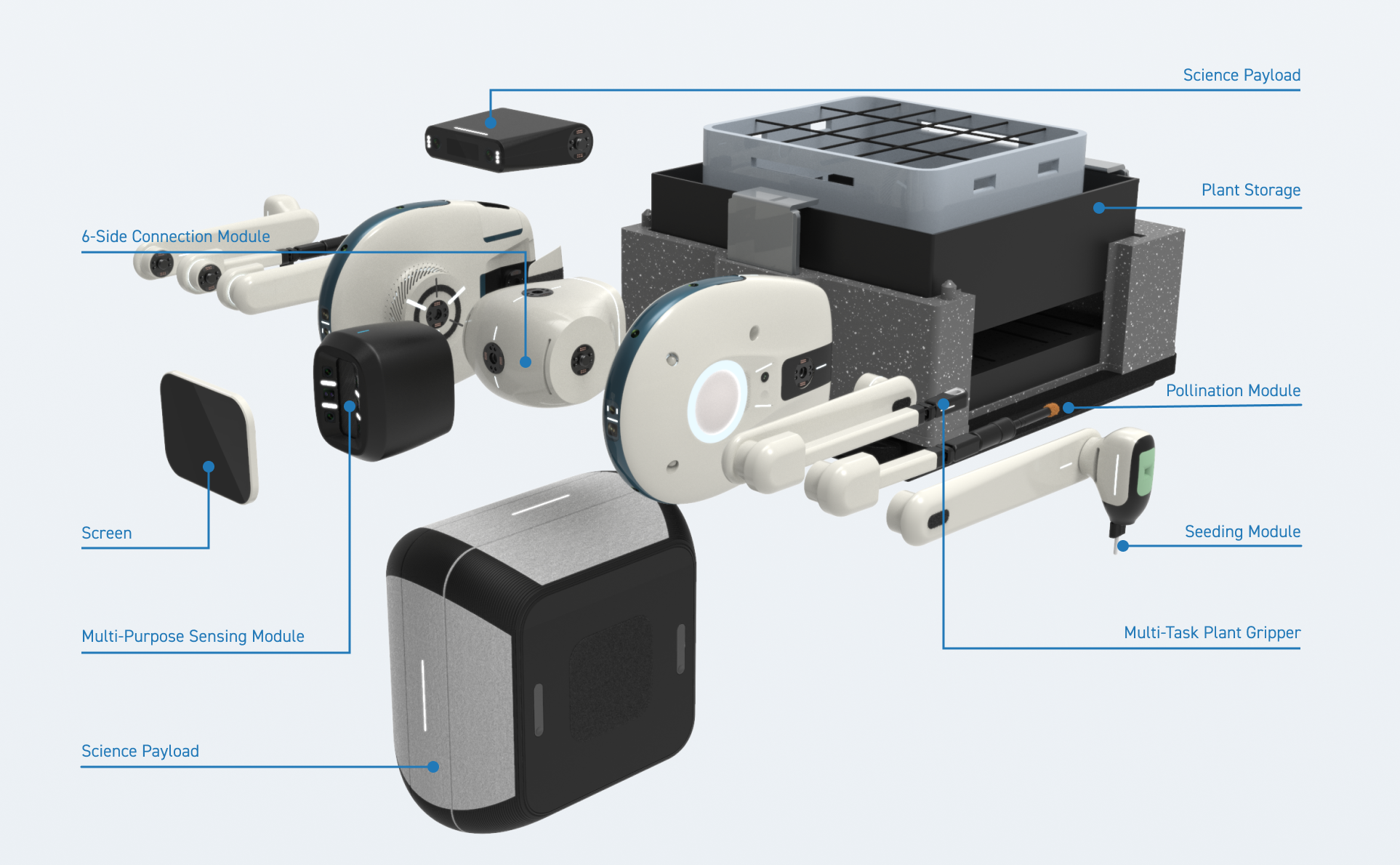
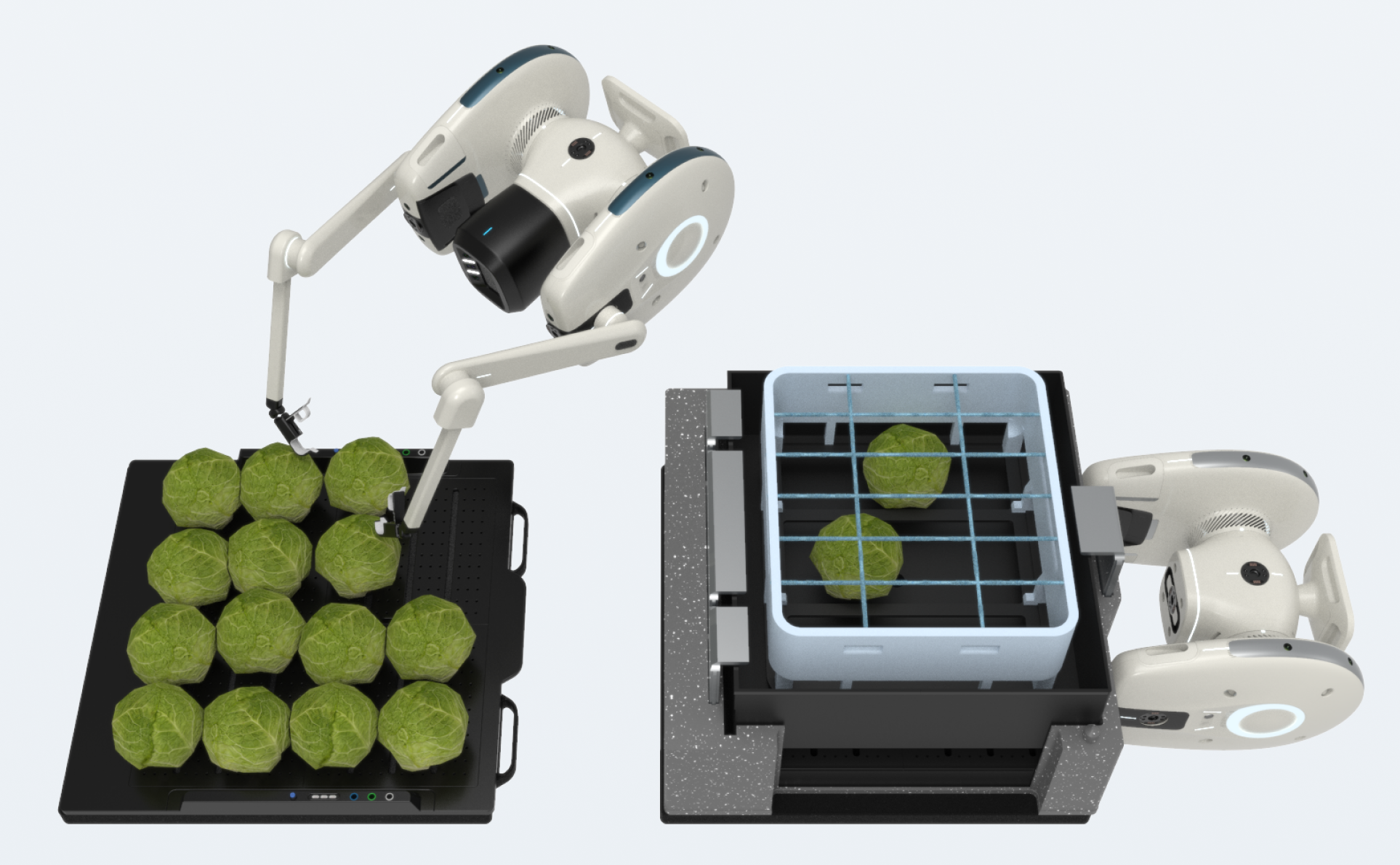
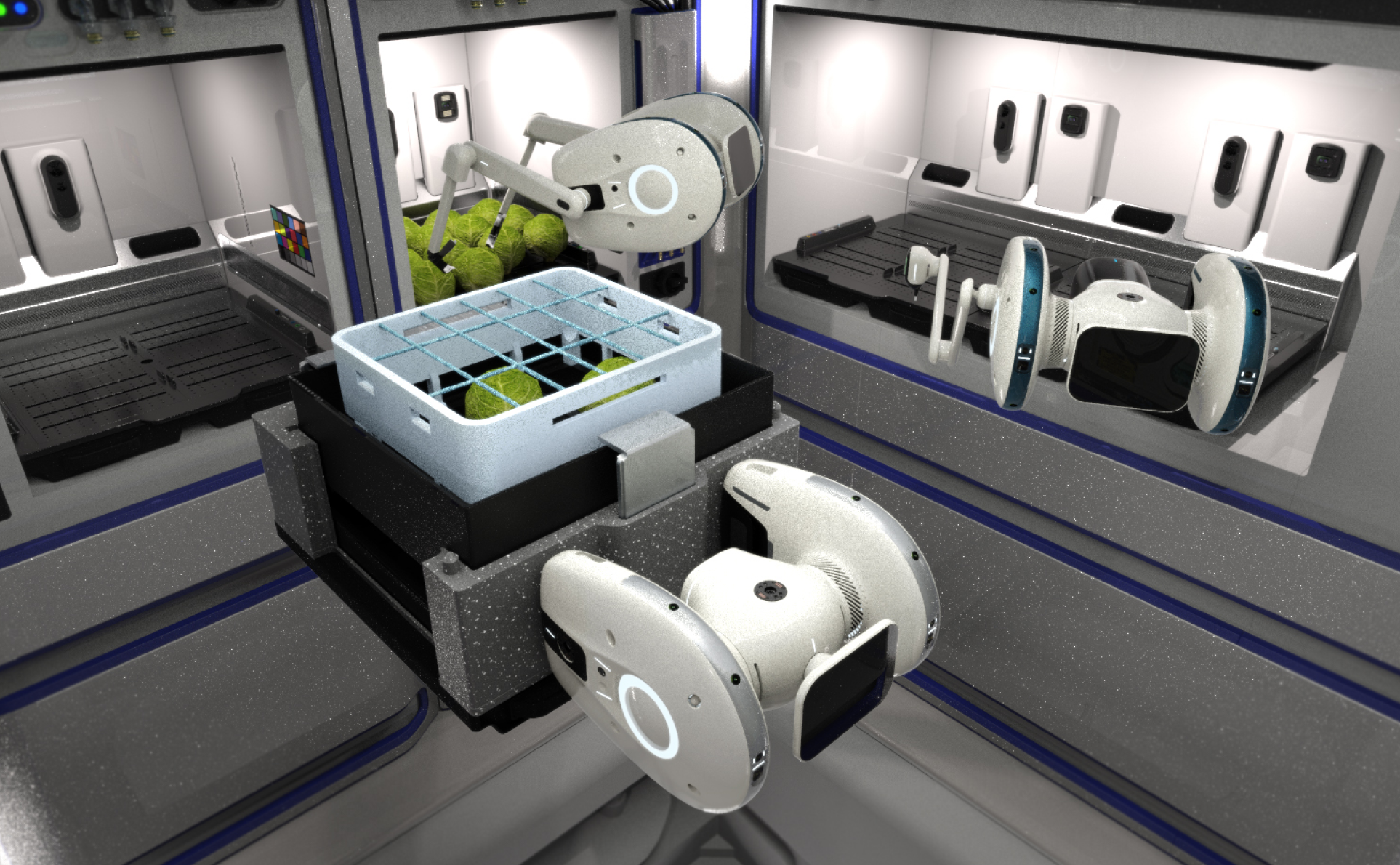
We experimented with various structure and propulsion system combinations using ideation sketches, formcore prototypes, and VR modeling. Considering the modularity and holonomic flight control requirements of the Astrobee, the team opted for a sandwich structure for the Astrobee body. A counterrotating impeller on each side of the body cancels the torque, and the utility module in the center functions as an expansion port for a variety of devices to be connected. The final layout of the Astrobee's arm incorporates rotating modules, arms, and grippers. The multiple rotation modules and arms together can build a multi-axis robot arm to satisfy a wide range of needs.
![]()
![]()
![]()
![]()
![]()
We experimented with various structure and propulsion system combinations using ideation sketches, formcore prototypes, and VR modeling. Considering the modularity and holonomic flight control requirements of the Astrobee, the team opted for a sandwich structure for the Astrobee body. A counterrotating impeller on each side of the body cancels the torque, and the utility module in the center functions as an expansion port for a variety of devices to be connected. The final layout of the Astrobee's arm incorporates rotating modules, arms, and grippers. The multiple rotation modules and arms together can build a multi-axis robot arm to satisfy a wide range of needs.
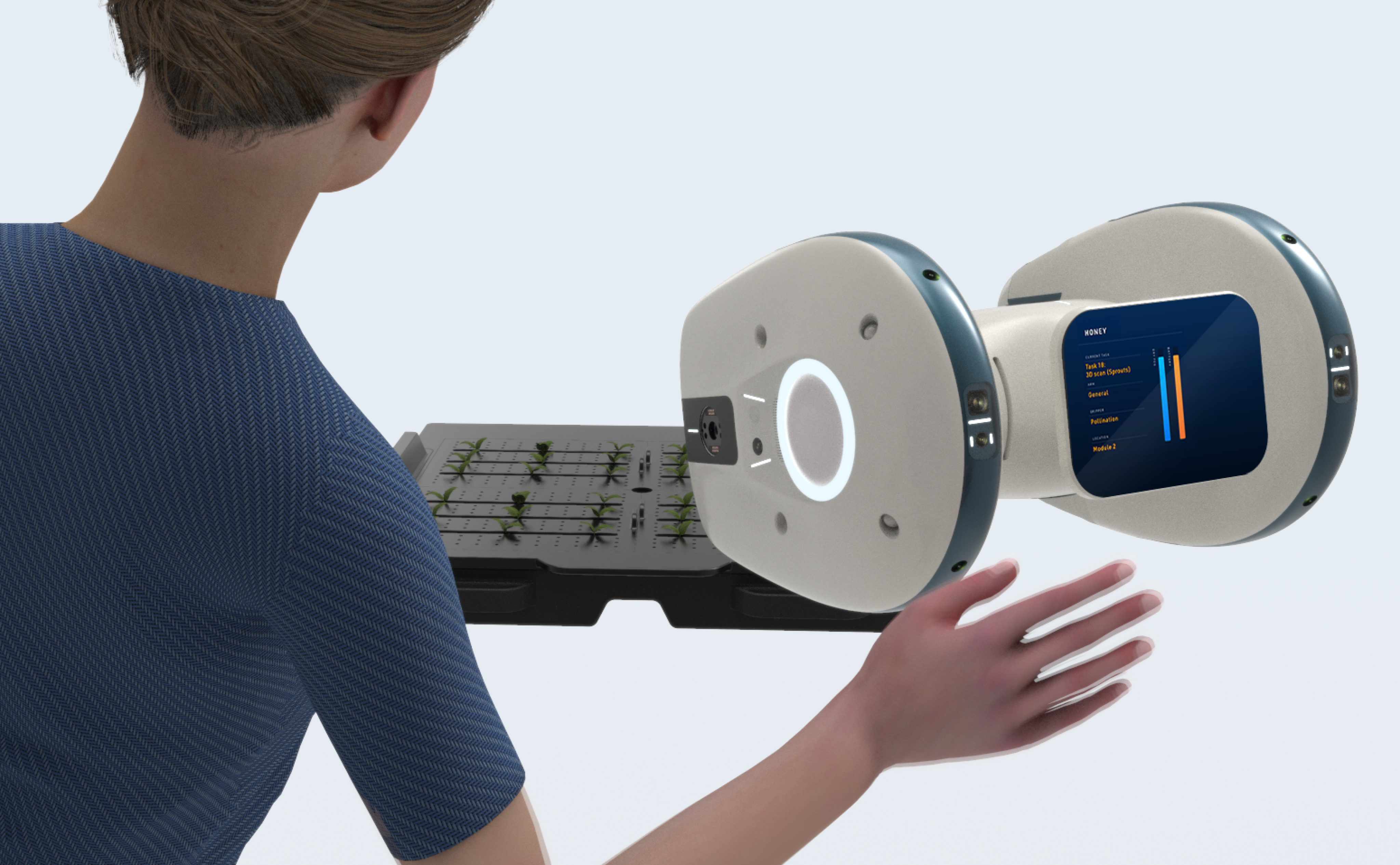
The team also brought a space station into VR to test the feasibility of the design. So we could simulate and try out the Lunar Gateway, just like astronauts’ training on Earth, to help us improve the final design. During this experiment, we discovered that:
︎The arm length was insufficient, which made it difficult to reach the plants' habitat (APH) at their full depth.
︎Because the propulsion system was on both sides of the body, the robot arm or external devices had a lot of limitations if they only connected to the utility module in the middle.
︎A screen could improve the user experience by showing astronauts what the robot is doing and what it wants to do.
︎The arm length was insufficient, which made it difficult to reach the plants' habitat (APH) at their full depth.
︎Because the propulsion system was on both sides of the body, the robot arm or external devices had a lot of limitations if they only connected to the utility module in the middle.
︎A screen could improve the user experience by showing astronauts what the robot is doing and what it wants to do.
Propulsion System:
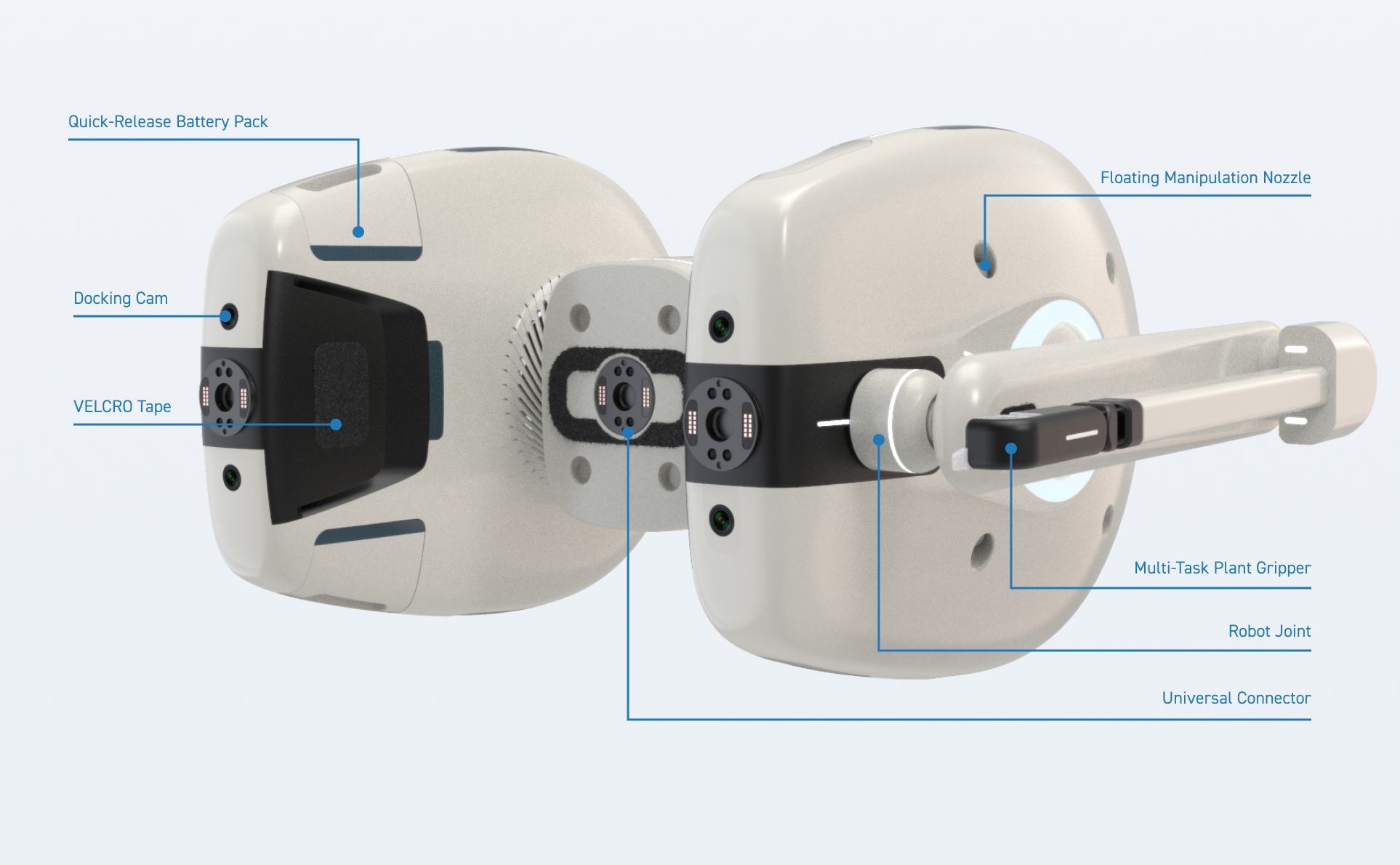
An integrated propulsion device was eventually created after several ideations. The new propulsion structure of the Astrobee was inspired by the Dyson BP01 air purifier. It enabled the development of a completely new propulsion system with a more compact design and less complex construction that effectively directs the wind across the spherical surface in different directions. As a result, we were able to incorporate all of the flight sensor parts, quick-release battery packs, and additional ports onto a single body.
![]()
An integrated propulsion device was eventually created after several ideations. The new propulsion structure of the Astrobee was inspired by the Dyson BP01 air purifier. It enabled the development of a completely new propulsion system with a more compact design and less complex construction that effectively directs the wind across the spherical surface in different directions. As a result, we were able to incorporate all of the flight sensor parts, quick-release battery packs, and additional ports onto a single body.
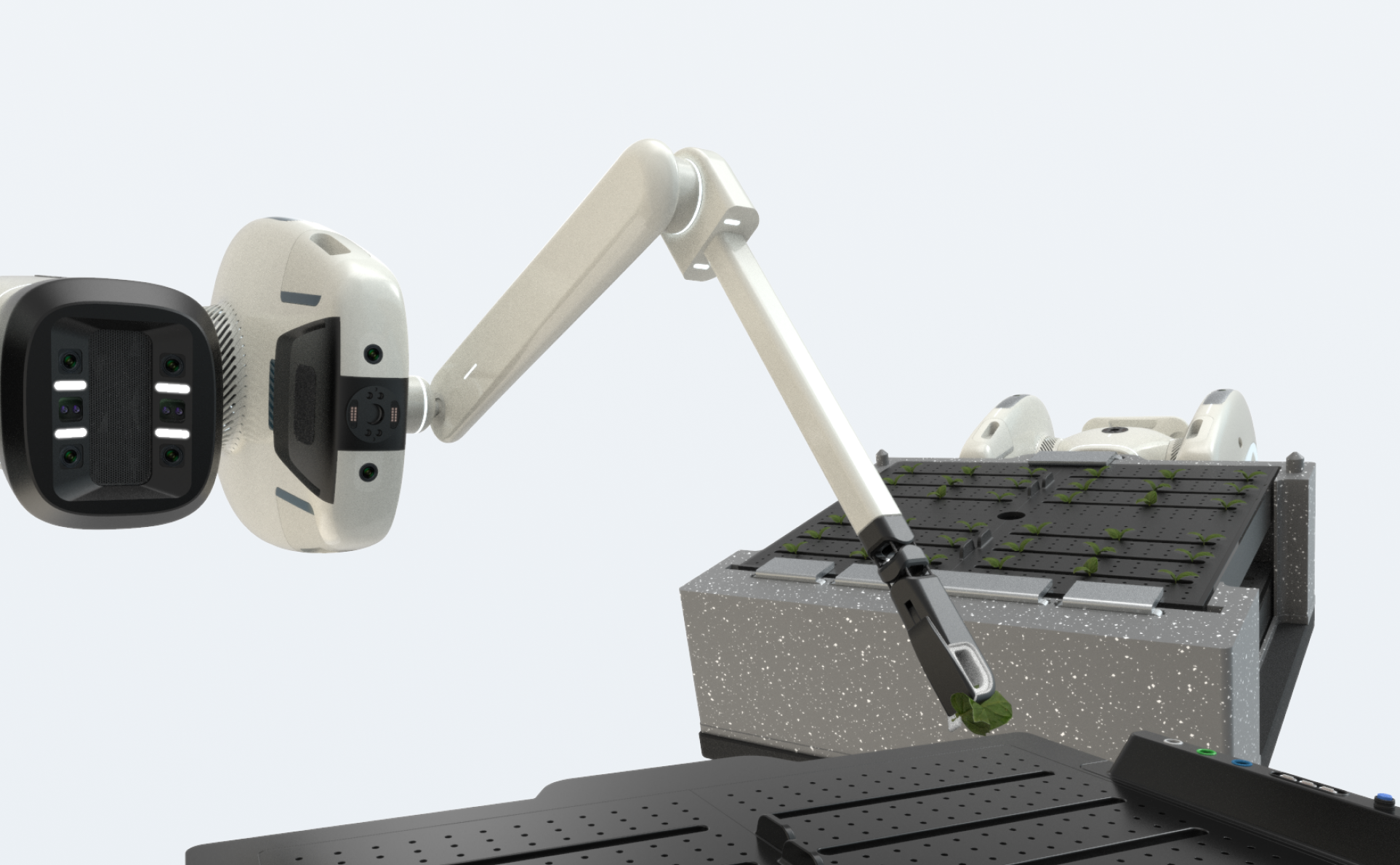
Grippers:
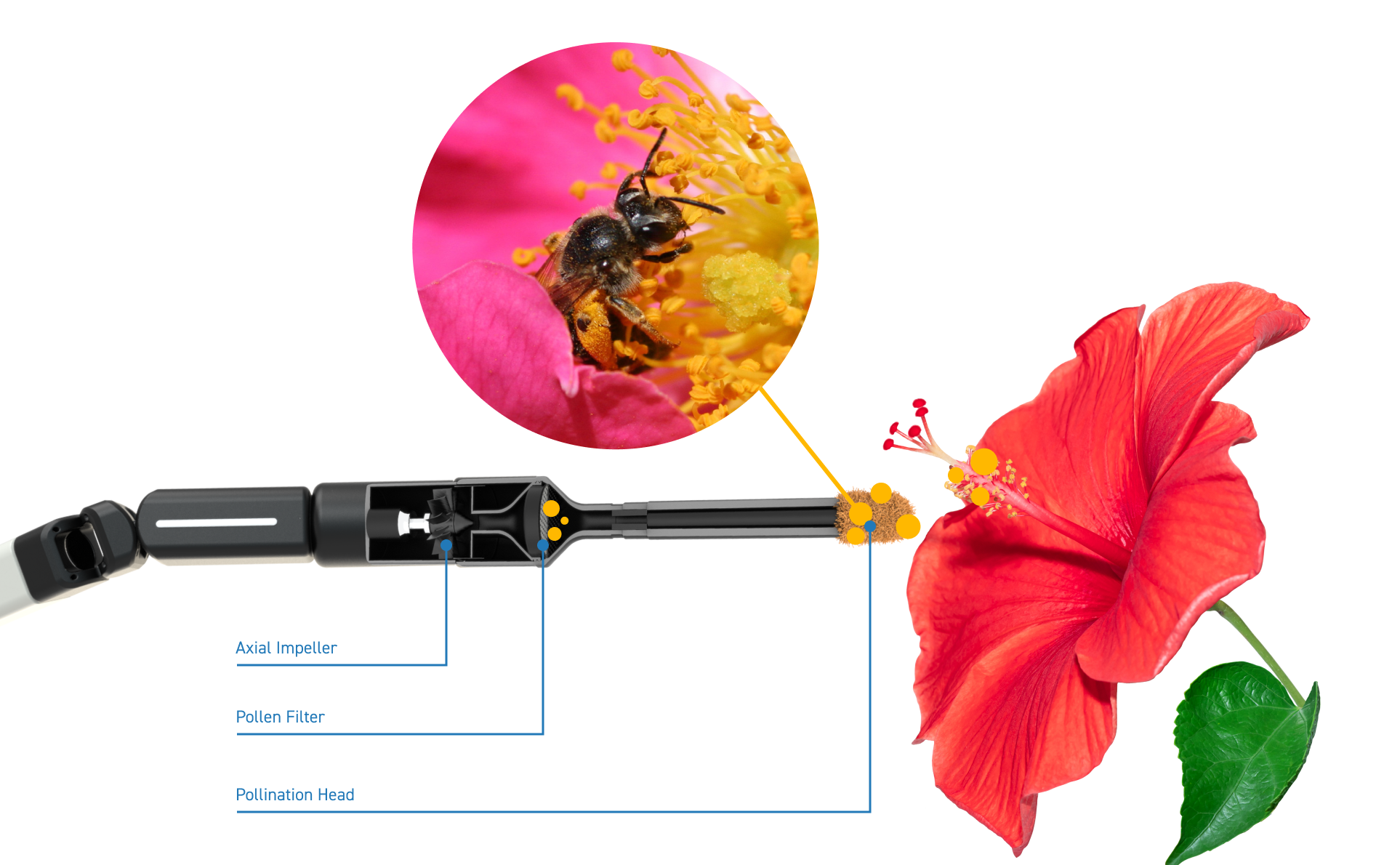
On the space station, safety is the top priority. Designing with softer, more flexible, retractable, and concealable elements rather than sharp edges became the key focus. The initial design of the gripper was inspired by numerous animal paws or claws. However, we later discovered that plants on space stations grow far better than plants on Earth. Thus, the gripper required a new design so that it could reach into thick undergrowth, trim sturdy stems, and pick up small, precise samples.
On the space station, safety is the top priority. Designing with softer, more flexible, retractable, and concealable elements rather than sharp edges became the key focus. The initial design of the gripper was inspired by numerous animal paws or claws. However, we later discovered that plants on space stations grow far better than plants on Earth. Thus, the gripper required a new design so that it could reach into thick undergrowth, trim sturdy stems, and pick up small, precise samples.
Final Design:
Final Design:
AstroM.A.R.S. -- a modular advanced robotic system